09_DL(Deep_Learning)
19_파이토치_기초문법
chuuvelop
2025. 5. 2. 21:49
728x90
파이토치_기초문법
텐서
- 파이토치는 텐서로 시작해서 텐서로 끝남
- 텐서를 잘 다룰 수 있어야 신경망에서 데이터 입력과 출력을 제어할 수 있음
# 파이토치 설치
# https://pytorch.org/
# Stable(2.7.0)>Windows>Pip>Python>CPU
# pip3 install torch torchvision torchaudio
import torch
텐서 생성 및 변환
- 텐서는 파이토치의 가장 기본이 되는 데이터 구조
- numpy의 다차원배열과 비슷하며 GPU에서도 연산 가능
# 2차원 텐서 생성
torch.tensor([[1, 2], [3, 4]])
tensor([[1, 2],
[3, 4]])
# gpu가 있다면
# torch.tensor([[1, 2], [3, 4]], device = "cuda:0") # cuda의 0번째 메모리를 쓰라
# dtype을 이용하여 텐서 생성
torch.tensor([[1, 2], [3, 4]], dtype = torch.float64)
tensor([[1., 2.],
[3., 4.]], dtype=torch.float64)
텐서를 ndarray로 변환
temp = torch.tensor([[1, 2], [3, 4]])
# ndarray로 변환
temp.numpy()
array([[1, 2],
[3, 4]], dtype=int64)
# gpu가 있다면
# gpu상의 텐서를 cpu의 텐서로 변환한 후 ndarray로 변환
# temp = torch.tensor([[1, 2], [3, 4]], device = "cuda:0")
# temp.to("cpu").numpy() # numpy는 그래픽카드에서 연산이 안되므로 cpu에 옮겨서 numpy로 변환을 해야함
텐서의 인덱스 조작
- 텐서는 넘파이의 다차원배열과 유사하게 동작하기 때문에 배열처럼 인덱스를 바로 지정하거나 슬라이싱 등을 사용할 수 있음
# 파이토치로 1차원 벡터 생성
temp = torch.FloatTensor([1, 2, 3, 4, 5, 6, 7])
# 인덱스로 접근
temp[0], temp[1], temp[-1]
(tensor(1.), tensor(2.), tensor(7.))
# 슬라이싱
temp[2:5], temp[4:-1]
(tensor([3., 4., 5.]), tensor([5., 6.]))
텐서 연산
- 텐서는 넘파이의 다차원배열처럼 다양한 수학 연산이 가능하며, gpu를 사용하면 더 빠르게 연산할 수 있음
- 단, 텐서 간의 타입이 다르면 연산이 불가
- 예) FloatTensor(32비트의 부동 소수점)와 DoubleTensor(64비트의 부동소수점) 간에 사칙 연산을 수행하면 오류 발생
# 길이가 3인 벡터 생성
v = torch.tensor([1, 2, 3])
w = torch.tensor([3, 4, 6])
# 길이가 같은 벡터 간 뺄셈 연산
print(w - v)
tensor([2, 2, 3])
텐서의 차원 조작
- 텐서의 차원을 변경하는 명령어
- view : 넘파이의 reshape와 유사
- cat : 다른 길이의 텐서를 하나로 병합
- transpose : 행렬의 전치 또는 차원의 순서 변경
# 2 X 2 행렬 생성
temp = torch.tensor([[1, 2], [3, 4]])
temp.shape
torch.Size([2, 2])
# 4 X 1 로 변경
temp.view(4, 1)
tensor([[1],
[2],
[3],
[4]])
temp.view(-1)
tensor([1, 2, 3, 4])
temp.view(1, -1)
tensor([[1, 2, 3, 4]])
temp.view(-1, 1)
tensor([[1],
[2],
[3],
[4]])
데이터로더
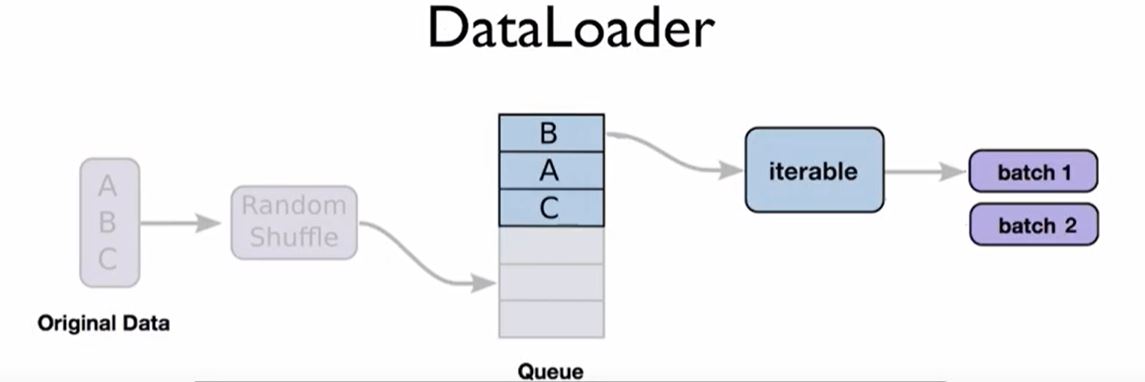
# 스택: 후입선출
# 큐: 선입선출
- torch.utils.data.DataLoader 는 학습에 사용될 데이터 전체를 보관했다가 모델 학습을 할 때 배치 크기만큼 데이터를 꺼내서 사용
- 주의할 점은 미리 데이터를 잘라 놓는 것이 아니라 내부적으로 이터레이터에 포함된 인덱스를 이용하여 배치크기 만큼 데이터를 반환
파이토치 데이터셋 사용
- torchvision은 파이토치에서 제공하는 데이터셋이 모여있는 패키지
- 파이토치 데이터셋을 다운로드 받으려면 requests 라이브러리 설치가 필요
- HTTP 요청을 하기 위함
import torchvision.transforms as transforms
from torchvision.datasets import MNIST
# 평균이 0.5, 표준편차가 1.0이 되도록 데이터의 분포를 정규화
mnist_transforms = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (1.0,))
])
data_path = "./data/MNIST_DATASET"
train_dataset = MNIST(data_path, transform = mnist_transforms, train = True, download = True)
test_dataset = MNIST(data_path, transform = mnist_transforms, train = False, download = True)

모델 정의
- 파이토치에서 모델을 정의하기 위해서는 module을 상속한 클래스를 사용
- layer : 모듈 또는 모듈을 구성하는 한 개의 계층
- 예) 합성곱층, 선형계층 등
- module : 한 개 이상의 계층이 모여서 구성된 것, 모듈이 모여 새로운 모듈을 만들 수도 있음
- layer : 모듈 또는 모듈을 구성하는 한 개의 계층
nn.Module() 을 상속하여 정의하는 방법
- 파이토치에서 nn.Module을 상속받는 모델은 기본적으로 __init__() 과 forward() 함수를 포함
- __init__() 에서는 모델에서 사용될 모듈, 활성화 함수 등을 정의
- forward() 함수에서는 모델에서 실행되어야 하는 연산을 정의
- nn.Sequential을 사용하면 init() 에서 사용할 네트워크 모델들을 정의해줄 뿐만 아니라 forward() 함수에서 실행되어야 할 계산을 좀 더 가독성이 뛰어나게 코드로 작성할 수 있음
- 또한, Sequential 객체에는 그 안에 포함된 각 모듈을 순차적으로 실행해 줌
import torch.nn as nn
class MLP(nn.Module):
def __init__(self):
# python2에서는 이렇게 작성했었으나, 3에서는 필요없음
# super(MLP, self).__init__()
super().__init__()
self.layer1 = nn.Sequential(
# 입력되는 채널수 1 / 출력 64/ 커널 수 5 -> 숫자 맞춰줘야함
nn.Conv2d(in_channels = 1, out_channels = 64, kernel_size = 5),
# inplace = True : input으로 들어온 값 자체를 수정
# 메모리 효율이 좋아지지만 input값이 사라짐
nn.ReLU(inplace = True),
nn.MaxPool2d(2)
)
self.layer2 = nn.Sequential(
nn.Conv2d(in_channels = 64, out_channels = 30, kernel_size = 5), # (28, 28, 1)
nn.ReLU(inplace = True), #(26, 26, kernnel)
nn.MaxPool2d(2) # (13, 13, kernel)
)
self.layer3 = nn.Sequential(
nn.Linear(in_features = 750, out_features = 10, bias = True), #(11, 11, 30)
nn.ReLU(inplace = True) #(5, 5, 30)
# 5 * 5 * 30 = 750
)
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = x.view(x.shape[0], -1)
x = self.layer3(x)
return x
# 모델 객체 생성
model = MLP()
list(model.children())
[Sequential(
(0): Conv2d(1, 64, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
),
Sequential(
(0): Conv2d(64, 30, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
),
Sequential(
(0): Linear(in_features=750, out_features=10, bias=True)
(1): ReLU(inplace=True)
)]
# 모든 노드들을 반환
list(model.modules())
[MLP(
(layer1): Sequential(
(0): Conv2d(1, 64, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer2): Sequential(
(0): Conv2d(64, 30, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(layer3): Sequential(
(0): Linear(in_features=750, out_features=10, bias=True)
(1): ReLU(inplace=True)
)
),
Sequential(
(0): Conv2d(1, 64, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
),
Conv2d(1, 64, kernel_size=(5, 5), stride=(1, 1)),
ReLU(inplace=True),
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
Sequential(
(0): Conv2d(64, 30, kernel_size=(5, 5), stride=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
),
Conv2d(64, 30, kernel_size=(5, 5), stride=(1, 1)),
ReLU(inplace=True),
MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
Sequential(
(0): Linear(in_features=750, out_features=10, bias=True)
(1): ReLU(inplace=True)
),
Linear(in_features=750, out_features=10, bias=True),
ReLU(inplace=True)]
함수로 신경망 정의
# 클래스 방식으로 정의하는것이 더 좋으나 함수로 정의해봄
def MLP(in_features = 1, hideen_features = 20, out_features = 1):
hidden = nn.Linear(in_features = in_features, out_features = hidden_features, bias = True)
activation = nn.ReLU()
output = nn.Linear(in_features = hidden_features, out_features = out_features, bias = True)
net = nn.Sequential(hidden, activation, output)
return net
모델 파라미터 정의
- 손실 함수(loss function)
- 학습하는 동안 출력과 실제 값(정답) 사이의 오차를 측정
- wx + b 를 계산한 값과 실제값 y의 오차를 구해서 모델의 정확성을 측정
- 자주 사용되는 손실 함수
- BCELoss : 이진 분류를 위해 사용
- CrossEntropyLoss : 다중 클래스 분류를 위해 사용
- MSELoss : 회귀 모델에서 사용
- 옵티마이저(optimizer)
- 데이터와 손실 함수를 바탕으로 모델의 업데이트 방법을 결정
- 옵티마이저의 주요 특성
- optimizer는 step() 메서드를 통해 전달받은 파라미터를 업데이트
- 모델의 파라미터별로 다른 기준을 적용시킬 수 있음
- torch.optim.Optimizer(params, defaults)는 모든 옵티마이저의 기본이 되는 클래스
- zero_grad() 메서드는 옵티마이저에 사용된 파라미터들의 기울기를 0으로 초기화
- torch.optim.lr_scheduler는 에포크에 따라 학습률을 조절할 수 있음
- 학습률 스케줄러(learning rate scheduler)
- 미리 지정한 횟수의 에포크를 지날 때마다 학습률을 감소시킴
- 학습률 스케줄러를 이용하면 학습 초기에는 빠른 학습을 진행하다가 전역 최소점(global minimum) 근처에 다다르면 학습률을 줄여서 최적점을 찾아갈 수 있도록 함
- 학습률 스케줄러의 종류
- optim.lr_scheduler.LambdaLR : 람다 함수를 이용하여 그 함수의 결과를 학습률로 설정
- optim.lr_scheduler.StepLR : 특정 단계(step)마다 학습률을 감마 비율만큼 감소
- optim.lr_scheduler.MultiStepLR : StepLR과 비슷하지만 특정 단계가 아닌 지정된 에포크에만 감마 비율을 감소시킴
- optim.lr_scheduler.ExponentialLR : 에포크마다 이전 학습률에 감마만큼 곱함
- optim.lr_scheduler.CosineAnnealingLR : 학습률을 코사인 함수의 형태처럼 변화시킴, 학습률이 커지기도 작아지기도 함
- optim.lr_scheduler.ReduceLROnPlateau : 학습이 잘 되고 있는지 아닌지에 따라 동적으로 학습률을 변화
- 지표(metrics)
- 훈련과 테스트 단계를 모니터링
전역 최소점과 최적점

- 손실 함수는 실제 값과 예측값 차이를 수치화 해주는 함수
- 이 오차 값이 클수록 손실 함수의 값이 크고, 오차 값이 작을수록 손실 함수의 값이 작아짐
- 손실 함수의 값을 최소화하는 가중치와 바이어스를 찾는 것이 모델 학습의 목표
- 전역 최소점(global minimum)은 오차가 가장 작을 때의 값을 의미하므로 우리가 최종적으로 찾고자 하는 것. 최적점
- 지역 최소점(local minimum)은 전역 최소점을 찾아가는 과정에서 만나는 홀(hole)과 같은 것으로 옵티마이저가 지역 최소점에서 학습을 멈추면 최솟값을 찾는 오차를 찾을 수 없는 문제가 발생
모델 훈련
- 모델을 학습시킨다는 것은 y = wx + b 라는 함수에서 w와 b의 적절한 값을 찾는다는 의미
- w와 b에 임의의 값을 적용하여 시작하며 오차가 줄어들어 전역 최소점에 이를 때까지 파라미터(w, b)를 계속 수정
- 딥러닝 학습 절차
- 모델, 손실 함수, 옵티마이저 정의
- 전방향 학습(입력 -> 출력 계산)
- 손실 함수로 출력과 정답의 차이(오차) 계산
- 역전파 학습(기울기 계산)
- 기울기 업데이트
- 파이토치 학습 절차
- 모델, 손실 함수, 옵티마이저 정의
- optimizer.zero_grad() : 기울기 초기화
- 파이토치는 기울기 값을 계산하기 위해 loss.backward() 메서드를 이용하는데, 이 때 새로운 기울기 값이 이전 기울기 값에 누적하여 계산됨
- 기울기 누적은 필요한 경우도 있지만 모델에 따라서는 불필요할 수 있음
- 따라서 기울기 누적 계산이 필요하지 않을 때는 입력 값을 모델에 적용하기 전에 미분값이 누적되지 않게 초기화 해야함
- optimizer.zero_grad() : 기울기 초기화
- output = model(input) : 출력 계산
- loss = loss_fn(output, target) : 오차 계산
- loss.backward() : 역전파 학습
- optimizer.step() : 기울기 업데이트
- 모델, 손실 함수, 옵티마이저 정의
728x90